最近更新:PLC 基础课 第13讲 置位、复位、翻转、保持:什么时候该用 SET/RST,什么时候不能乱用
2026-04-14
最近更新:PLC 基础课 第12讲 上升沿、下降沿、单次触发:为什么按一次按钮,程序会执行好几遍?
2026-04-14
最近更新:PLC 基础课 第11讲 数学运算与工程量换算:加减乘除、比例缩放、显示修正怎么做
2026-04-14
最近更新:伺服基础课 第18讲 高频应用中的伺服调试:高速起停与冲击负载调试技巧
2026-03-22
2025-12-27
从信号检测论看 PLC 阈值设定:为什么你的系统总是“误报警”?
浏览量:129 次 发布时间:2025-12-27 20:30 作者:明扬工控商城 下载docx
在自动化工程师的职业生涯中,最头疼的往往不是写逻辑,而是调参数。
你是否遇到过这种尴尬: 为了保护电机,你把过载电流阈值设得很灵敏,结果产线稍微一波动就跳闸,老板质问你为什么产线老停机; 为了保产线不间断运行,你放宽了报警阈值,结果电机烧了 PLC 还没反应,维修班埋怨你程序写得不保险。
这种“按下葫芦浮起瓢”的窘境,其实可以用心理物理学中的**信号检测论(Signal Detection Theory)**完美解释。
一、 两个维度:能力(d
′
)与策略(β)
在信号检测论中,任何检测任务(无论是雷达看飞机,还是 PLC 看故障)都由两个独立因素决定。
1. 辨别力指数 d
′
:你的硬件“硬实力”
d
′
代表的是系统将“故障信号”从“环境噪音”中剥离出来的能力。
信号 (Signal):真正的故障,如电机堵转、轴承卡死。
噪音 (Noise):干扰项,如启动冲击电流、变频器高频干扰、传感器零点漂移。
如果你的传感器精度高、布线屏蔽好,这两个分布(山峰)就分得开,d
′
就大。
2. 判断标准 β:你的调试“性格”
即便硬件固定(d
′
没变),你设置在 PLC 里的那个比较指令阈值,就是 β。它代表了你在模棱两可时,倾向于报“有故障”还是“没故障”。
二、 为什么误报警总是在所难免?
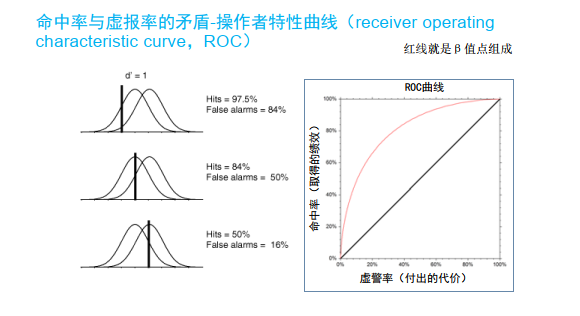
请看这张经典的 ROC 曲线图。它揭示了一个工程师必须面对的冷酷真相:在系统辨别力(d
′
)固定的前提下,命中率与虚报率是“捆绑”在一起的。
1. 当你设置“宽松型标准”时(图中左上方点)
做法:你为了绝对安全,把报警电流阈值设得很低,延时设得很短。
结果:命中率极高,绝不漏掉一个故障;但虚报率(误报警)也极高。哪怕是正常的负载波动,系统也会“惊叫”着跳闸。
2. 当你设置“严格型标准”时(图中右下方点)
做法:你为了产线稳定,把阈值设得很高。
结果:虚报率极低,产线运行如丝般顺滑;但代价是命中率大幅下降。当真正的危险来临时,系统选择了“沉默”,直到设备冒烟。
结论: 误报警(虚报)并不是因为你粗心,而是因为你在当前的硬件环境下,为了保证不漏检而必须付出的“代价”。
三、 工程师的实战决策:如何跳出“死循环”?
如果你发现无论怎么调 PLC 的参数(调整 β),都无法同时满足“不跳闸”和“不烧电机”,那么请停止在程序里做无谓的微调。
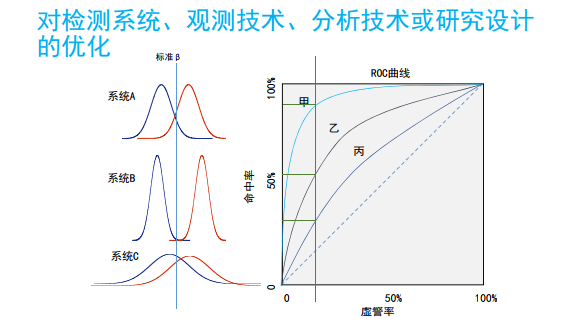
策略一:拉开“山峰”的距离(提升 d
′
)
这是最高级的解决办法。如果 d
′
提升了,整条 ROC 曲线会向左上方跳跃。
硬件层面:换用更高精度的电流互感器,改善接地的屏蔽工艺,减少电磁噪音干扰。
软件层面:在 PLC 程序中使用数字滤波算法(如滑动平均滤波、中位值滤波)。这本质上是在数学层面过滤噪音,强行拉开故障与正常波动的距离。
策略二:基于成本的“最优 β 选择”
如果硬件无法更改,老板要求你给出一个方案,你应该通过“代价分析”来定坐标:
如果设备极贵且容易烧毁:选择左上角的点。接受误报警,宁可错杀,不可放过。
如果停机一分钟损失百万:选择右下角的点。忍受微小的过载风险,保住产线不停工。
四、 结语
一名优秀的自动化工程师,不应仅仅盯着那个“数值”,而应看透背后的“分布”。
能力(d
′
)决定了系统的上限,而标准(β)决定了你的决策代价。
下次当你面对那个不断报错的 HMI 画面时,请问问自己:我是该去改程序里的那个数字(β),还是该去车间检查一下那根没接地的信号线(d
′
)?
互动环节: 在您的项目中,有没有过那种让你“调到崩溃”的报警阈值?最终你是通过改程序搞定的,还是通过改硬件搞定的?欢迎在评论区分享你的避坑经验。

推荐阅读:
PLC 基础课 第15讲 手动、自动、急停、复位:设备模式切换逻辑该怎么设计
PLC 基础课 第13讲 置位、复位、翻转、保持:什么时候该用 SET/RST,什么时候不能乱用
PLC 基础课 第12讲 上升沿、下降沿、单次触发:为什么按一次按钮,程序会执行好几遍?
PLC 基础课 第11讲 数学运算与工程量换算:加减乘除、比例缩放、显示修正怎么做
从信号检测论看 PLC 阈值设定:为什么你的系统总是“误报警”?.docx
将本文的Word文档下载到电脑
推荐度:
全部评论
相关文章
为您推荐

精品文章

热门推荐
大家都在看
- 最近更新:三菱FX5U PLC操作教程:从入门到实践
- 最近更新:从信号检测论看 PLC 阈值设定:为什么你的系统总是“误报警”?
- 最近更新:PLC 基础课 第15讲 手动、自动、急停、复位:设备模式切换逻辑该怎么设计
- 最近更新:伺服基础课 第18讲 高频应用中的伺服调试:高速起停与冲击负载调试技巧
- 最近更新:PLC 基础课 第13讲 置位、复位、翻转、保持:什么时候该用 SET/RST,什么时候不能乱用
- 最近更新:PLC 基础课 第12讲 上升沿、下降沿、单次触发:为什么按一次按钮,程序会执行好几遍?
- 最近更新:PLC 基础课 第11讲 数学运算与工程量换算:加减乘除、比例缩放、显示修正怎么做